


No cenário global, o desenvolvimento da robótica tem registado um crescimento significativo nos últimos anos, impulsionado por dois factores principais. Por um lado, muitos produtos novos envolvem a colocação precisa de algumas peças, o que é problemático para os seres humanos, exigindo muita concentração e grande esforço físico e mental. Por outro lado, o surgimento de sistemas de desenvolvimento acessíveis a todos, especialmente aos jovens, deu nova vida ao sector da robótica, gerando um novo tipo de experimentadores do tipo “faça você mesmo” (chamados “makers”) que hoje criam a partir de ideias e protótipos dos quais muitas indústrias dependem para sua própria produção. Por exemplo, a Makers Faire é realizada todos os anos em muitos países, em Roma, Itália, onde são apresentados sistemas robóticos de desempenho cada vez mais elevado.
Do lado científico, muitas universidades que lidam com robótica lidam com aspectos puramente mecânicos e electrónicos, e hoje, nem é preciso dizer, ligam a inteligência artificial às máquinas.
A interação humano-robô (interação humano-robô, ou HRI) é um tema de grande interesse que se desenvolve ao longo do continuum desde o projeto técnico até a psicologia e a filosofia. Sobre este último aspecto, por exemplo, há 40 anos surgiu uma grande polêmica sobre um tema que dava seus primeiros passos, a chamada “robótica antropomórfica” que postula máquinas capazes de substituir completamente o ser humano. O sonho (ou pesadelo?) era manter a indústria sem luz 24 horas por dia, produzindo produtos sem nenhum ser humano no armazém.
Hoje, felizmente, a visão mudou e tendemos a fabricar robôs não para substituir os humanos, mas para simplificar a sua vida, realizando todos os processos que são complicados e/ou cuja precisão deve ser muito elevada. Neste cenário, humanos e robôs coexistem nos mesmos espaços e, portanto, gostem ou não, interagem. Consideremos, por exemplo, empilhadores robóticos num armazém onde mulheres e homens trabalham: é claro que se os humanos têm de seguir regras para a sua segurança, por um lado, então os robôs devem estar equipados com dispositivos de segurança para evitar problemas no outro lado.
Assim, este subconjunto de HRI denominado Interação Física Humano-Robô (PHRI) tem se desenvolvido cada vez mais e se concentra em tornar segura a interação entre humanos e máquinas, sobretudo equipando os robôs com sensores e técnicas de detecção inovadoras. Na verdade, os requisitos industriais modernos exigem que o mesmo robô seja adaptável a diferentes cenários tendo em conta a flexibilidade e a ergonomia na cadeia de produção. Neste cenário, utilizar câmeras de vídeo como sensores é por um lado muito caro, e por outro lado muito complexo para processar um grande número de imagens de alta resolução. Isso torna sua implementação em robôs impraticável.
Trabalhos de investigação recentes realizados pelo Departamento de Informática, Bioengenharia, Robótica e Engenharia de Sistemas (DIBRIS) da Universidade de Génova e da Elbatech Srl (da qual o autor faz parte) deram um passo muito importante no sentido de melhores sistemas robóticos integrados ao homem. Ser (1). Houve duas inovações principais:
– Criar redes compactas e interligadas de sensores “táteis” capazes de dotar o robô da capacidade de detetar a força de contacto de um objeto ou humano;
– Integração de sensores táteis com uma série de inovadores “sensores de proximidade” capazes de permitir ao robô detectar a presença de objetos e objetos próximos, antes de qualquer contato físico.
Os sensores táteis são projetados especificamente para fornecer múltiplos pontos sensíveis e contam com efeitos capacitivos, assim como interruptores de “toque” para acender as luzes de uma casa: neste caso, a presença de um dedo cria uma diferença na carga elétrica entre dois condutores que é medido por um microcontrolador Farinha destinada a este fim. No nosso caso, um desses dois condutores é uma mancha metálica no circuito, enquanto o outro é uma simples camada de Lycra condutora que cobre todo o espaço ocupado pelos locais sensíveis. A Figura 1 mostra um robô para colocação de peças automotivas equipado com um par de conjuntos de sensores táteis.

Figura 1. Robô equipado com sensores de toque para posicionamento do para-brisa “facilmente” determinado por um operador humano. No círculo no canto inferior esquerdo, você pode ver o mapa da mão vista pelo robô, onde é importante observar áreas com diferentes intensidades de sinal, o que permite ao controlador tomar decisões subsequentes e mover o robô de forma adequada. No oval no canto superior direito você pode ver um segundo botão sensível, onde a área preta é o tecido condutor de Lycra descrito no texto.
Entre outros detalhes, uma imagem da palma da mão do operador vista pelo robô é mostrada na Figura 1. Isto não deve ser enganoso, porque usamos o termo “toque”, que aliás se refere ao sentido do tato que nos humanos é principalmente expresso com as mãos. Na verdade, o sensor é definido como “tangível” exatamente na direção oposta, ou seja, do ponto de vista do robô. Sua “mão” é um cilindro preto contendo dezenas de sensores de toque, e é apenas por coincidência que a coisa que está sendo tocada, neste caso, é ela própria uma mão humana!
Decidiu-se formar triângulos sensores com cada triângulo contendo 10 pontos, ver Figura 2. Cada triângulo está ligado aos vizinhos com os quais se comunica para formar uma rede fortemente interconectada. Uma folha de triângulos é chamada de “remendo” e é construída sobre um suporte flexível no qual os triângulos individuais são conectados entre si por pequenas trilhas. O remendo pode ser facilmente dobrado e adaptado a superfícies não planas, como a parte cilíndrica. de um pedaço de pano. Braço robótico:
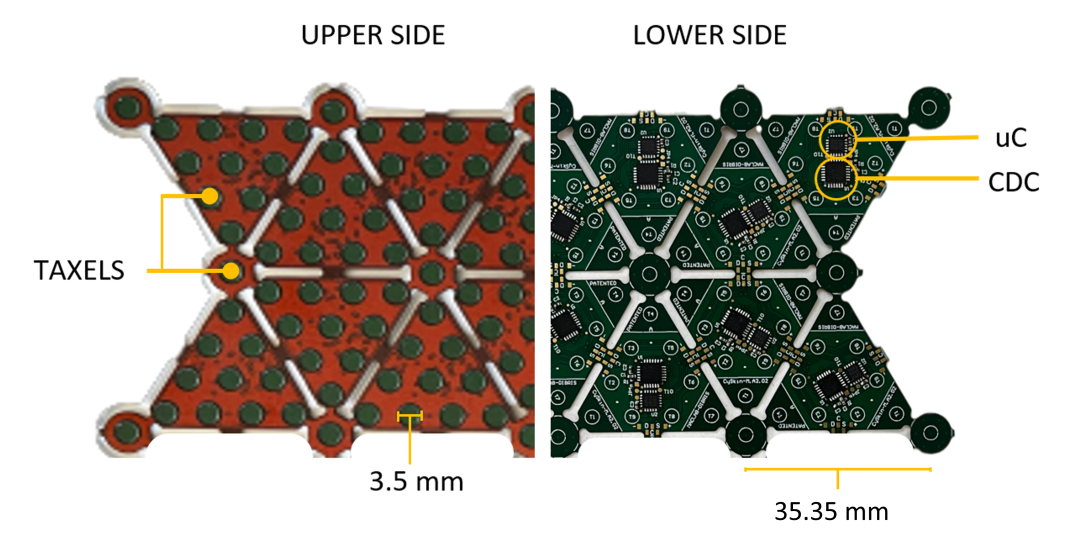
Figura 2. Parte do patch do sensor de toque. À esquerda estão os pontos sensíveis e a interligação via taxéis. À direita está a parte inferior dos próprios sensores, com os componentes eletrônicos necessários, incluindo o microcontrolador (uC) e o medidor de capacitância (CDC).
Mas os sensores de toque por si só não podem fornecer uma interface HRI sofisticada. O fato de operar com base na força/pressão corporal exige necessariamente que ocorra contato entre o robô e o corpo. Isto impede toda uma série de atividades nas quais é importante que o robô perceba e talvez reconheça a presença de corpos próximos.
Pense, por exemplo, em um braço robótico programado para repetir determinado movimento indefinidamente, por exemplo pegar um objeto com o punho, girá-lo 180 graus e colocar o objeto do outro lado. Até agora, o braço não pode fazer nada além de seguir humildemente as instruções com as quais foi programado, mesmo que haja um obstáculo no caminho do seu espaço de trabalho, conforme mostrado na Figura 3:
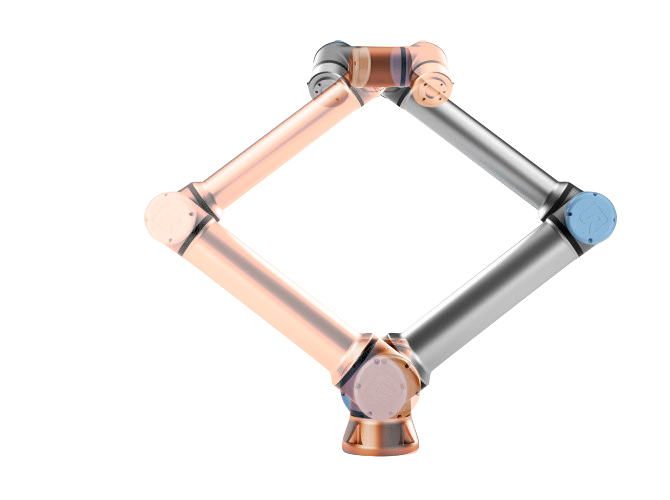
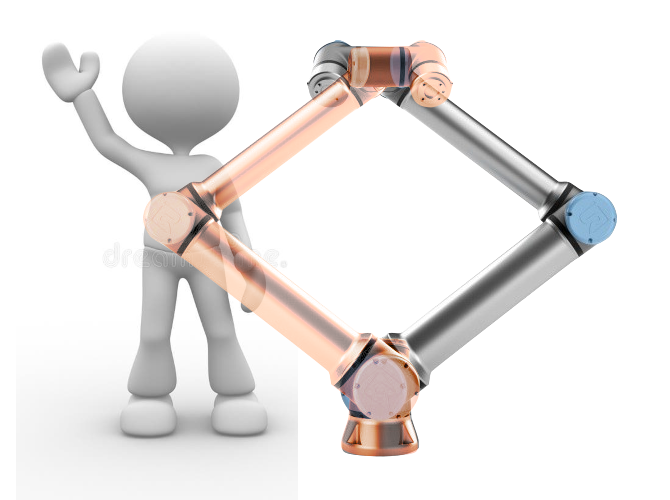
Figura 3. À esquerda, o braço do robô (cinza) gira 180 graus para a posição oposta (dourado). À direita, se o braço não estiver equipado com sistema de reconhecimento de obstáculos, realiza a operação programada independentemente de haver um obstáculo, neste caso uma pessoa, no caminho.
Para superar o problema, estudos anteriores (2) tentaram integrar discos equipados com sensores magnéticos multimodais e sensores de proximidade no robô. No entanto, esta solução não é adaptável a robôs gerais, mas aplica-se apenas a um tipo muito específico. Além disso, os sensores de proximidade utilizados possuem alcance de trabalho de apenas 10 cm, o que não permite ao robô ter uma percepção real do mundo ao seu redor.
Usamos sensores baseados em “tempo de voo” (sensores de tempo de voo ou ToF). Funciona mais ou menos como o relógio óptico sobre o qual escrevi recentemente em Elbareport e falei sobre a dilatação do tempo (https://www.elbareport.it/scienza-ambiente/item/68395-pillole-di-scienza-3-la-fantastica-scoperta-della-dilatazione-del-tempo): O emissor de laser emite pulsos de luz infravermelha que, caso atinjam um objeto ou objeto, são refletidos e capturados por uma matriz 8 x 8 de pontos sensíveis no dispositivo ToF. Assim obtém-se um pequeno mapa de pixels que coleta informações de obstáculos localizados a uma distância de até 4 metros do emissor, veja Figura 4:
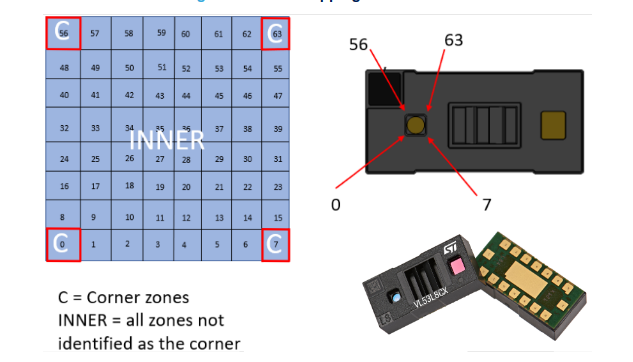
Figura 4. Sensor de tempo de voo usado para construir os emblemas do robô. O elemento que emite a luz infravermelha é visível (o pequeno retângulo avermelhado abaixo das letras ST) e o conjunto de sensores que recebe o sinal refletido (o círculo azul do outro lado) consiste em uma matriz 8 x 8 de locais sensíveis.
Organizamos, portanto, uma rede ToF capaz de atender à necessidade de escanear todo o mundo ao redor do robô. Dado o ângulo de aceitação dos sensores, decidimos montar “braços” de 10 ToF cada, e no caso de um braço de robô com aproximadamente 1 metro de altura, estimamos que apenas duas bandas seriam suficientes para obter uma visão completa, conforme mostrado pelas simulações de calculadora realizadas durante a fase de projeto, Figura 5:
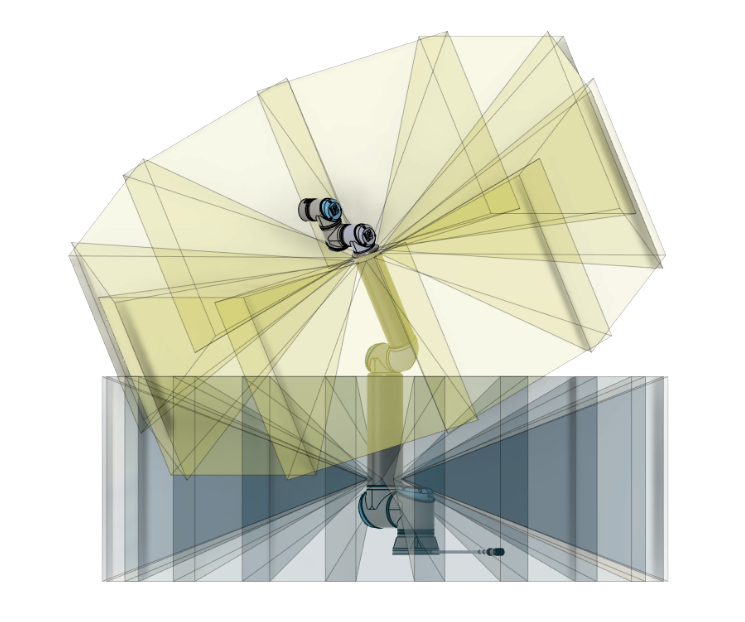
Figura 5. Modelo CAD (projeto auxiliado por computador) do braço do robô UR10e com projeção FOV (campo de visão) de duas bandas, cada uma composta por 10 sensores. As partes amarela e cinza escuro apresentam interferência entre os feixes de luz proporcionando uma boa margem de trabalho garantindo que toda a área de 360° seja coberta.
A integração de sensores de toque e de proximidade permitiu criar um braço robótico completo e sofisticado, capaz de acionar por software, mas também de tomar decisões autônomas caso sejam detectados obstáculos. Esta integração foi extremamente difícil, demonstrando que um conceito geral simples muitas vezes requer um esforço significativo de engenharia para ser colocado em prática. Uma questão importante é certamente a integridade dos sinais elétricos ao longo da complexa rede de sensores, já que o ruído elétrico, ambiental e térmico é declarado inimigo. Mas a implementação de soluções totalmente digitais (em vez de analógicas) também requer soluções avançadas para garantir que os fluxos de sinal ocorram em momentos específicos e conhecidos.
A figura 6 a seguir mostra o diagrama final do braço do robô integrando todos os tipos de sensores descritos:
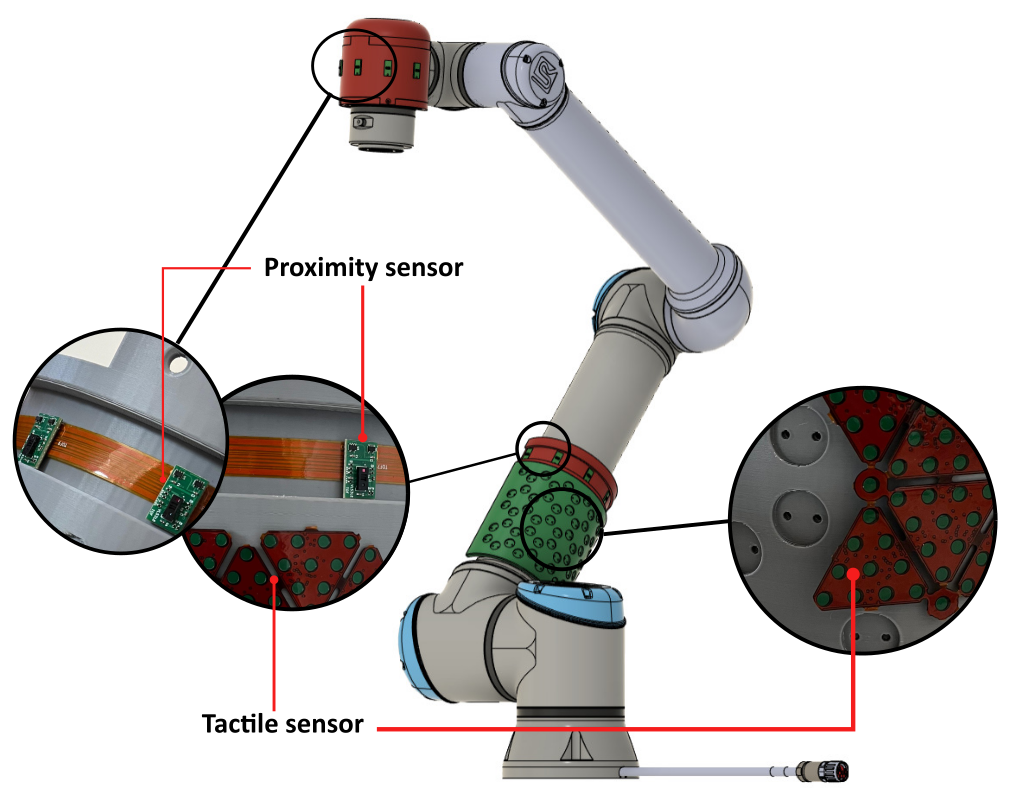
Figura 6. Braço do robô com sensores de toque integrados e anel de sensor de proximidade. Os circuitos contêm as imagens reais desses sensores conforme foram instalados nos protótipos criados.
Os testes realizados no robô mostraram a total confiabilidade e robustez do sistema criado, mas ao invés de incomodar vocês com uma série de dados, prefiro mostrar um vídeo do teste realizado em algumas séries de sensores ToF. Como somos marinheiros, tivemos que experimentar o sistema nadando. No vídeo do link a seguir, o grupo de pixels brancos (ou seja, pixels 3D) representa o maior número de pontos detectados pelos sensores que juntos formam a percepção do robô sobre o seu entorno. Como pode ser visto, os ToFs fornecem não apenas informações sobre a presença do objeto, mas também informações sobre sua dinâmica, o que torna esta técnica particularmente útil para sistemas de controle rápidos e confiáveis.
Este é o link: https://youtu.be/wls35aarBV4
Marco Sartore
(1) “De CySkin a ProxySKIN: Design, Implementação e Teste de uma Pele Robótica Multimodal para Interação Humano-Robô”, Sensores, 2024, 24, 1334. https://doi.org/10.3390/s24041334
(2) “Matriz de sensores multimodais para interação humano-robô e exploração de espaço confinado usando robôs contínuos”, IEEE Sensors J. 2022, 22, 3585–3594.

“Guru de comida típica. Solucionador de problemas. Praticante de cerveja dedicado. Leitor profissional. Baconaholic.”


More Stories
Como os pombos conseguem sentir o campo magnético da Terra
NASA divulga mapa inédito com 6 mil potenciais mundos além do Sistema Solar
Cientistas desenvolvem “plástico vivo” que se decompõe totalmente em poucos dias